 Sign in
Sign in
3D Grip Points - Transform Points
Transform Points operation is an operation plug-in working with grip points (handles) in a 3D model. Defined transformation is applied to selected grip points.
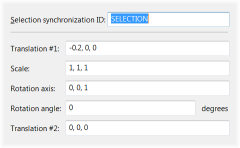
The Selection synchronization ID specifies identifier of the view state with selected grip points (and should be left as is in most cases).
Other parameters control the actual transformation. The final transformation is composed of 4 simple transformation applied in predefined order.
- Translation #1 - value is added to coordinates of grip point.
- Scale - given value and grip points coordinates are multiplied (per component).
- Rotation - grip point coordinates are rotated around the specified axis by the specified angle. The axis is defined by the given point and origin of coordinate system [0, 0, 0].
- Translation #2 - value is added to coordinates of grip point.
Two translations can be used to simply specify a scaling center or rotation axis not intersecting the origin of the coordinate system. By moving the points, rotating or scaling them and moving them back, you can effectively change the origin of the coordinate system for the transformation.
Internals
GUID: 5680F69D-4894-4F6E-8488-0F370A1E62F8
| Parameter name | Type | Default | Value | Note |
| SelectionSync | string | SELECTION | valid state with selection | |
| Translation1 | vector3 | (0, 0, 0) | ||
| Scale | vector3 | (1, 1, 1) | ||
| RotationAxis | vector3 | (1, 0, 0) | not (0, 0, 0) | |
| RotationAngle | float | 0 | 0-360 degrees | |
| Translation2 | vector3 | (0, 0, 0) |
 Recent comments
Recent comments
 reddit
reddit Facebook share
Facebook share